|
�ĸ˻����Ľṹ��ʽ |
|||||
|
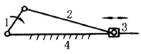
��ƽ�����˻����й㷺Ӧ���ĸ˻�����ֻ����ʵ��ijЩ����Ҫ��ʱ���ö�˻���������Ҫ��������зŴ����á����и��õĴ������ú��ѵĴ����ǡ��ڹ̶����������ض��Ĵ����ľ����Լ������ɶ����ϵĺ�����켣�ۺϻ����� ��������ĸ˻����Ǿ����ĸ�ת�����Ľ����ĸ˻�����ͼ�й���4Ϊ����������1��3�������������Ϊ���ܸ������й���1��Ի�����������ת������Ϊ����������3��Ի�����һ���Ƕ���ҡ������Ϊҡ��������2���������������Ϊ���ˡ����ֻ�����Ϊ����ҡ�˻��������ǽ����ĸ˻����������һ�� |
|
||||
|
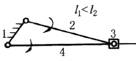
�����ĸ˻�����������������Ĺ����ܷ��Ϊ�������������� |
|||||
|
����̸˳���+��˳��ȡ��������˳���֮���� �ڨO���ܳ���-����������ܸ˳��ȨO�ݨO���˳���-��һ���ܸ˳��ȨO |
|||||
|
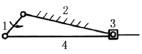
�����ĸ˻����Ľṹ��ʽ���±��������ĸ˻������˶�������ʽ�������ֳ����ĸ˻������˶�������ʽ |
|||||
|
�˶��� ���� |
��̸˳���+��˳������������˳���֮�� |
��̸˳���+��˳��� ���������˳���֮�� |
|||
|
�ĸ�ת���� |
����ҡ�˻���
|
˫��������
|
����ҡ�˻���
|
˫ҡ�˻���
|
˫ҡ�˻��� (��һ�˾���������) |
|
����ת������ һ���ƶ��� |
�����������
|
ת�����˻���
|
�ڶ����˻���
|
����ҡ�����
|
�ƶ����˻���
|
|
����ת������ �����ƶ��� |
���һ���
|
ʮ�ֻ���������
|
���һ���
|
��Բ�ǻ���
|
�����
|