|
三种常用四杆机构的运动分析公式(杆1为原动件) |
||
|
机 构 名 称 及 运 动 简 图 |
运 动 分 析 公 式 |
|
|
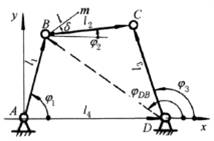
铰接四杆机构
|
位 置 |
|
|
|
||
|
|
||
|
xm=l1cosφ1+lcos(φ2+δ),ym=l1sinφ1+lsin(φ2+δ) |
||
|
|
||
|
速 度 |
ω2=-ω1l1sin(φ1-φ3)/l2sin(φ2-φ3);ω3=ω1l1sin(φ1-φ2)/l3sin(φ3-φ2); |
|
|
|
||
|
υmx=-l1ω1sinφ1-lω2sin(φ2+δ);υmy=l1ω1cosφ1+lω2cos(φ2+δ) |
||
|
加 速 度 |
|
|
|
|
||
|
|
||
|
|
||
|
|
||
|
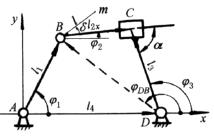
曲柄摇块机构
|
位 置 |
|
|
|
||
|
|
||
|
|
||
|
令l3=0,即为对心曲柄摇块机构的运动分析公式(下同) |
||
|
速 度 |
ω2=ω3=-ω1l1cos(φ1-φ2)/(l2x+l2cosα); |
|
|
|
||
|
υmx=-l1ω1sinφ1-lω2sin(φ2+δ);υmy=l1ω1cosφ1+lω2cos(φ2+δ) |
||
|
加 速 度 |
|
|
|
|
||
|
|
||
|
|
||
|
曲柄导杆机构
|
位 置 |
l1cosφ1=l3xcosφ3;a+l1sinφ1=l3xsinφ3;tanφ3=(a+l1sinφ1)/l1cosφ1;l3x=l1cosφ1/cosφ3 |
|
xm=l1cosφ1+lcos(φ3±δ);ym=l1sinφ1+lsin(φ3±δ)+a |
||
|
极位夹角θ=2arcsin(l1/a)=Ψ(导杆摆角) |
||
|
速 度 |
ω2=ω3=ω1cos(φ1-φ3)cosφ3/cosφ1;υC2/3=-ω1l1sin(φ1-φ3);υE=ω3lDE; |
|
|
|
||
|
υmx=-l1ω1sinφ1-lω3sin(φ3±δ);υmy=l1ω1cosφ1+lω3cos(φ3±δ) |
||
|
加 速 度 |
|
|
|
|
||
|
|
||
|
|
||
|
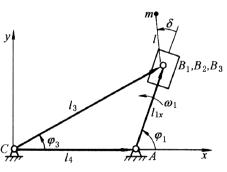
回转曲柄导杆机构
|
位 置 |
|
|
l1x=l3sinφ3/sinφ,极位夹角θ=2arcsin(l4/l3) |
||
|
滑块相对导杆的位移 |
||
|
xm=l4+l1xcosφ1+lcos(φ1±δ),ym=l1xsinφ1+lsin(φ1±δ) |
||
|
速 度 |
ω3=ω1cos(φ1-φ3)sinφ3/sinφ1;ω2=ω1,υr=υB1B2=l3ω1sin(φ1-φ3)sinφ3/sinφ1; |
|
|
|
||
|
υxm=υrcosφ1-l1xω1sinφ1-lω1sin(φ1±δ);υym=υrsinφ1+l1xω1cosφ1+lω1cos(φ1±δ) |
||
|
加 速 度 |
|
|
|
|
||
|
|
||
|
|
||
|
|
||
|
注:表中求φ2和φ3计算式中的“±”号应根据机构的连续位置确定。m点为杆2上距B铰点长为l,与杆2(杆3)呈δ角的点。 |
||