|
�ĸ˻�������ת��ϵ����ϻ��� |
|
|
���������Ϲ����г��� |
ͼ(1) �ĸ˽�����������ת��ϵ������ϻ���
ͼ(2) �ĸ˽���-��ת��ϵ��ϻ������˶�����
ͼ(3) �ĸ˽���-��ת��ϵ��ϻ��� |
|
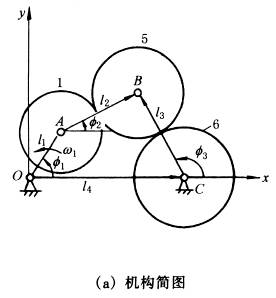
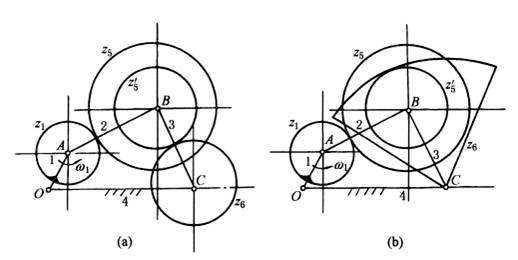
ͼ(1)Ϊ�ĸ˽�����������ת��ϵ������ɵ���ϻ�����������Ϊ����1�����Ϲ����г���z1�����Բ�뾶Ϊr1(r1��ʱҲ�ɴ�����������l1)������5�����ڽ���B���������6��������C���������������ԵȽ��ٶ���1������תʱ�������ĸ˻������˳߶Ⱥͳ��ֳ����IJ�ͬ�������������6���ܵõ��������ֲ�ͬ���͵��˶�����������ͣЪ��ĵ�������ת��(ͼ2a)������˲ʱͣЪ(m��)�ĵ�������ת��(ͼ2b)����������˲ʱͣЪ��(m��n)�IJ�����ת��(ͼ2c)�� ���ݽṹ��Ҫ������5Ҳ��������˫������ʽ����ͼ(3)��5��5'����ͼb���������6Ϊ�ڳ��֡��ĸ˽�����������ת��ϵ������ϻ�������Ʋ���ͷ������¡� 1)��2�Ľ�λ��f2�����ٶ���2�ͽǼ��ٶ���2��
E��l4-l1cosf1 F��-l1sinf1
2)��3�Ľ�λ��f 3�����ٶ���3�ͽǼ��ٶ���3��
3)����6�Ľ�λ��f6�����ٶ���6�ͽǼ��ٶ���6(ͼ(1)��ʾ��ʽ����ϻ���)��
ʽ�� f10��f20��f30������1��2��3����ʼλ�á� 4)ͼ(3)��ʾ��ʽ��ϻ�����������ٶ���6��
ͼ(3)a��ʾ����������������ͼb��ʾ���������ø��š� 5)����6������˶�����Ϊ��ͣЪ��ĵ�������ת��ʱ������������������1��ת��f1��0��2���е���һλ��ʱ��Ӧ������(����' )��0�� 6)����6������˶�����Ϊ��һ��˲ʱͣЪ��ĵ�������ת��������������������1��ijһת��λ��f1ʱ������(����' )��0�� 7)����6������˶�����Ϊ��m��nʱ��������˲ʱͣЪ�����������������1��ij����ת��λ��ʱ(��Ӧm��n)��������(����' )��0������mn������������(����' )��0�� 8)�����и��߶Ȳ������˶���Ӱ�졣���ݷ�������������ϻ�������������˻����ĸ��˳��Ȳ�����ֻ�ı���ֵij�������������ֵ��˶����ɱ䶯������2��3�ij�������ֵĽ�Բ�뾶����һ�����ι�ϵ����ͼ(1)��ʾ��ʽ��l2��r1+r5��l3��r5+r6��ͼ(3)a��ʾ��ʽ��l2��r1+r5��l3��r'5+r6��ͼ(3)b��ʾ��ʽ��l2��r2+r5��l3��r6- r'5����������ϻ�������Ҫ��Ʊ���Ϊ���������ij���l1�ͻ��ܵij���l4��һ�����ʱ���ȶ�l1��Ȼ������l4�� l4��l4minʱ����6����һ��˲ʱͣЪ����l4��l4minʱ����6�п��ܳ��ֶ���˲ʱͣЪ�㣻l4��l4minʱ����6ֻ�DZ�����ͣЪ�� 9)�ܳ���˲ʱͣЪ���������l4��l4min��
ʽ�е������������з���ʽ�� Kcos4��-Lcos2��-M��0 (14)
10)����˲ʱͣЪ��ʱ����Ӧ��������λ��f1
|
|
|
�����Ϲ����г��� |
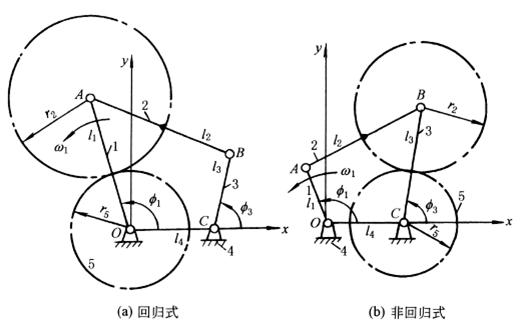
ͼ(4)�ĸ˽���-��ת��ϵ��ϻ��� |
|
��ͼ(4)��ʾΪ�ĸ˽�����������ת��ϵ��ɵ���ϻ�����������Ϊ����1������2�Ϲ����г���2�������Ϊ����5��������ϻ����ж�����ʽ���ٻع�ʽ(�����5��������1������)���ڷǻع�ʽ(�����5���3������)�������ĸ˻������˵ij߶Ⱥͳ��ֳ����IJ�ͬ����������������ԵȽ��ٶ���1������תʱ�������5�ɻ����ͼ(2)��ʾ�IJ�ͬ�˶����ɡ�������ϻ�������Ʋ���ͷ������¡� 1)����ת��ϵ�Ľ��ٱȹ�ʽ�����ʱ��Ļ��ֺ��ֿ�����������5�Ľ�λ��f5�����ٶ���5�ͽǼ��ٶ���5�� �ع�ʽ(ͼ4a)��f5��f50+(1+i)(f1-f0)-i(f2-f20)�� ������������������������������������������ (19) ��5��(1+i)��1-i��2 (20) ��5��(1+i)��1-i��2 (21) �ǻع�ʽ(ͼ4b)��f5��f50+(1+i)(f3-f30)-i(f2-f20)���� ������������������������������������(22) ��5��(1+i)��3-i��2 (23) ��5��(1+i)��3-i��2 (24) ʽ������������������i���� �����ȣ� f10��f20��f30��f50���� ��1��2��3����5����ʼλ�ýǣ� f2��f3����2����3����2����3���� ��2��3��λ�ýǡ����ٶȺͽǼ��ٶȣ����ĸ˽�������OABC��ã��ɰ�ʽ(1)��ʽ(6)���㡣 2)�������5����˲ʱͣЪ����ʱ�����������ݻ�������������˶���ϵ���Լ�˲ʱͣЪʱ����5��0����5��0���������������з����Է�������������� �ع�ʽ��
�ǻع�ʽ��
���з������о���������δ֪������l1/l4��l2/l4��l3/l4��i��f10��f 30�����ʱһ�����ѡ���ĸ˽��������ĸ˳���l1/l4��l2/l4��l3/l4��Ȼ�������з��������i��f10��f30�� �����־���ͣЪ���Ե��ĸ˽���-��ת��ϵ��ϻ����г��˼���˲ʱͣЪ���Ե��ĸ�-��ת��ϵ��ϻ����ij߶���Ƽ��㹫ʽ������Ҫ��Ʋ���Ϊ����ѡ�����и�����f10��f30����ѡ������2��5�������ϻ��������������������i�ķ�Χ���ۼ����ĸ˽��������и��˵ij��ȱ���һ�����ѡ��l4��1���������й�ʽ����l1/l4��l2/l4��l3/l4��ȡ����ֵ���ܸ˳�ѡ������Ӧ���������һ�����й�ʽУ�鲢ȷ��һ���ĸ˽������������ԡ� �ĸ˨C��ת��ϵ��ϻ������������ĸ˽�������Ϊ����˳��ȵ�˫������������������˲ʱͣЪ���������нϼѵĴ������ܡ�ͼ����˲ʱͣЪ���ԵĻع�ʽ˫����-�����ϳ�����ϻ����������ͼ��ͼ����˲ʱͣЪ���ԵĻع�ʽ˫����-�����ϳ�����ϻ����������ͼ��ͼ����˲ʱͣЪ���Եķǻع�ʽ˫����-�����ϳ�����ϻ����������ͼ��ͼ����˲ʱͣЪ���Եķǻع�ʽ˫����-�����ϳ�����ϻ����������ͼ���г���������ʽ��ϻ����������ͼ������Ƽ��㲽�����¡� ��ѡ������ϻ����ǻع�ʽ���Ƿǻع�ʽ����ѡ��z2��z5�������ϻ��������ϡ� ��ѡ�����ܵij���l4����������ʽ��ϻ���������Ϊ���ĸ˽�������Ϊ˫������������l4ͨ�����ĸ��˳��е�����ߡ� �۸��ݽṹҪ����ѡ���˳�l2��l3�� �ܸ���l2/l4��l3/l4������ͼ����˲ʱͣЪ���ԵĻع�ʽ˫����-�����ϳ�����ϻ����������ͼ��ͼ����˲ʱͣЪ���ԵĻع�ʽ˫����-�����ϳ�����ϻ����������ͼ��ͼ����˲ʱͣЪ���Եķǻع�ʽ˫����-�����ϳ�����ϻ����������ͼ��ͼ����˲ʱͣЪ���Եķǻع�ʽ˫����-�����ϳ�����ϻ����������ͼ����������Ͷ�Ӧ��ͼ����ͼ�е�ʵ�߶���������i(i����z2/z5��������Ϊ������֮Ϊ��)������ͼ�е㻮�߶�����������1����ʼλ�ý�f10��ͼ�е�����Ϊ�ĸ˽��������и�2��3�����е���С��������min���ɹ������������������ʱ�ο��� �ݰ���ʽ���������˳�l1(l1ȡ����ֵ)��
����ѡ�������ǻع�ʽ��������ѡ��l4��1�� l2/l4��3�� l3/l4��2������ͼ����˲ʱͣЪ���ԵĻع�ʽ˫����-�����ϳ�����ϻ����������ͼ�ɲ��i��2.5��f10��-3������min��54������
|
|