|
超越止动及单向机构 |
||||
|
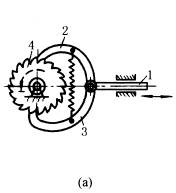
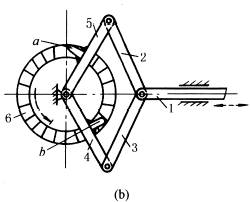
图(1)中,当主动棘轮1顺时针方向转动时,通过爪2带动轴3转动,3可超越1作顺时针方向转动,在超越时由于离心力(转速足够时)的作用能使爪2不与轮1接触,实现无声超越。如果1固定,当3反转时被止动。此机构在棘爪2开始与棘爪1啮合时,要利用棘爪2大头的重力,因此机构的回转轴O必须水平放置。如起重机吊起重物悬空停留时,重物不能使轴3反转。 图(2)中,左旋弹簧2的内径稍小于轴3的外径,使结合面间略有预压紧力,弹簧的右端与轮1上的销接触,左端为自由端,主动轮1顺时针方向转动时,弹簧内径缩小,结合面间的压紧力和摩擦力越来越大带着轴3转动,轮1逆时针方向转动时,弹簧内径增大,结合面间的压紧力消失,轴3可作超越转动。若1(或3)固定时,则3与图示方向反向转动(或1与图示相同方向转动)时被止动。 |
||||
|
图(1)无声棘轮超越止动机构 |
图(2)弹簧式摩擦超越止动机构 |
|||
|
图(3)中,轮2装在有右螺旋的轴1上,起动电机与轴1相连,被起动的发动机的起动曲轴与盘3相连,起动时电机逆时针方向转动,则轮2左移(开始限制件2转动,而当件3起动后,件2又脱离限制装置,图中未示出),其端面与盘3压紧靠摩擦力带动曲轴,当发动机转速高于轴1时,3与2脱开,发动机曲轴作超越转动。当轴1回转时,限制轮2转动的装置未在图中示出。 图(4)a,杆1左右移动时,均使棘轮4单向旋转。此机构已用于脉冲计数器作计数装置。图b,轮6为端面棘轮,杆2、3(或4、5)等长,当主动杆1往复移动时,固结在杆4、5上的棘爪a、b交替推动端面棘轮6单向转动。 |
||||
|
图(3)螺旋摩擦式超越止动机构 |
图(4)双动式单向转动机构 |
|||
|
图(5)中,摇杆1上两个棘爪交替推动棘齿条2作单向移动。 图(6)中,构件1、2与棘轮5自由装在轴6上,构件2上固定有销a、b,件4与件1、3铰接。当1顺时针方向转动时,1通过销b带着2、3和棘轮5一起转动。当1逆时针方向转动时,通过4将3抬起与棘轮脱离,通过销a带着棘爪3实现无声逆转。 图(7)中,主动杆1带着2往复运动时,从动轴3作单向转动。 |
||||
|
图(5)双动式棘齿条单向机构 |
图(6)无声棘轮单向机构 |
图(7)钢球式单向机构(超越离合器) |
||
|
图(8)中,齿轮1、2和轴Ⅰ之间分别装有超越离合器a、b,它们在轴Ⅰ上反向安装。当主动轴Ⅰ正向转动时,通过离合器a,齿轮1和3带动从动轴Ⅱ转动,离合器b空转。主动轴换向时,离合器a空转,而由离合器b和齿轮2、4、5带动轴Ⅱ,此时,从动轴转向不变,但传动比发生了变化。 图(9)中夹头外壳2的内侧有圆锥面,两端有大小不同的圆柱面可作导路来导引嵌着钢球3的滑块4,弹簧将滑块4压向左边,滑块中心有金属线5通过。当摆杆1逆时针方向摆动时,钢球3将金属线5夹紧并带动其向右移动,摆杆1顺时针方向摆动时,钢球3放松金属线,摆杆仅带动夹头2回程,金属线5不动。 |
||||
|
图(8)超越离合器-齿轮式单向机构 |
图(9)单向定长送料机构 |
|||