|
可调行程机构 |
|
|
下图a,曲柄及连杆长度均可调节的四杆机构ABCD的主动圆盘1回转时,带动从动摇杆3往复运动。调节螺旋5可改变曲柄销B的位置,从而改变曲柄1的长度AB。调节紧定螺钉6可改变连杆2的长度BC。由于构件长度的改变,输出件3的摆角行程相应改变。 图b,主动偏心轮1绕固定轴A回转时,带动导杆2运动。调节螺旋3改变机架AC长度,从而改变输出杆4的行程。 图c均为多杆机构。主动曲柄1回转时,从动摇杆3作往复摆动。调节滑块2的位置(实际为改变机构中某一构件与机架铰接点位置),可改变从动杆3的摆动行程。 图d,曲柄1绕A轴回转,通过连杆2使构件3绕B轴摆动;滚子a安置于构件3内缘与棘轮4(星形轮)轮齿所形成的楔形槽内,从而带动该棘轮按图示转向间歇转动。导块5可在曲柄1的导槽b内移动,并紧固在某一所需的位置,即可改变曲柄1的长度,则构件3的摆角及棘轮4每次的转角都将随之变化。 |
|
|
螺旋调节机构 |
|
|
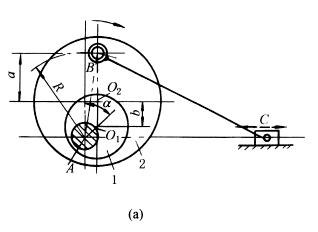
下图a,圆盘2上曲柄AB绕轴A回转,带动滑块C作往复运动,曲柄AB的长度R是可调的,调节时将偏心轮1绕A转动α角后,将轮1和盘2固连。曲柄长度为:
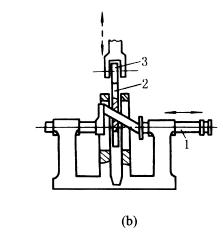
式中 a―― 曲柄销B到盘2圆心O2的距离; b―― 盘2圆心O2到偏心轮1圆心O1的距离; r―― 偏心轮1的偏心距,r=AO1; α―― 偏心轮1的回转角度。 图b,凸轮2用滑键联接于轴1的倾斜轴颈上,当轴1轴向移动时,凸轮2的偏心发生变化,从而改变了从动件3的行程。 图c,曲柄1回转时带动活塞3作往复运动,调节时将偏心轮2绕O轴转动,改变机架的长度达到调节行程的目的。调好后将偏心轮2固定于此位置。 图d,机构的输入轴上装有齿轮1和偏心轮2,输出轴上装有棘轮4,并空套有U形摆杆5,棘爪3安装在U形摆杆上。输入轴由齿轮带动转动时,偏心轮2使U形摆杆5往复运动,由棘爪推动棘轮实现单向间歇运动。该机构偏心轮的偏心量可以调整,是通过图中的两个腰形孔和两个螺栓来实现的。改变偏心量,便改变了U形摆杆的摆动角度,从而改变了棘轮的转角大小。 |
|
|
偏心调节机构 |
|
|
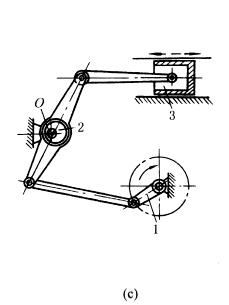
下图均是运转中能进行调节运动的机构,要求机构有两个自由度(个别有三个自由度),即要求有两个主动件(其中有一个输入主运动,另一个输入调节运动),当调节主动件调到需要的位置之后,将它固定,则机构就成为一个自由度的机构。 图a,通过改变构件6的位置(如Ⅰ、Ⅱ之间的位置)来改变机架的长度,实现调节从动件5的行程。构件6调节好以后,固定于某一位置。常用于换向配气机构。 图b、c都是通过改变构件2的位置,从而改变某一构件长度,实现调节从动件3的行程。机构b在运转时可调节连杆2的转角,从而改变杆OA的长度,实现调节从动件3的往复移动行程。机构c在运转时调节杆2(实为同时调节A、B的相互位置),以实现调节从动件3的摆动行程。 图d、e都是通过改变曲柄滑块机构中滑块的导向方位实现调节。机构d中,杆1可在角度α的范围内绕B转动,调节到某一所需位置,从而控制阀门2的行程或换向,使活塞3的气体受到控制。杆1调好以后固定于所需位置,活塞3通过连杆、曲柄等杆件与阀门2联动。机构e表示用直线机构DEFG上C点轨迹的直线段(图示位置此直线段与直线mm重合)代替导杆的机构。将构件2转动到某一位置,C点直线段方位(即mm直线)发生变化,C点行程也相应发生变化。构件2调好后应予固定,此时D、G即是在机架上的铰接点。 |
|
|
连杆调节机构 |
|
|
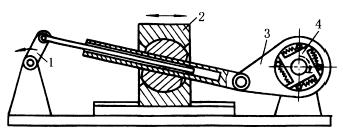
右图中,当主动件1匀速转动时,带动从动件3往复摆动,并使输出件4脉动转动。当移动构件2以改变机架长度时,从动件3得到不同的摆角,从而使输出件4得到不同的转角或脉动角速度。构件2调整好后应予固定。这种机构用于脉动无级变速机构。此外,可调的棘轮机构也是回转角可调的应用实例。 |
回转角可调的机构 |
|
下图(a)中,主动曲柄1通过连杆2、5带动齿条7,使齿轮8往复转动,摆杆10与齿轮8固联,齿轮8往复转动时,通过固联杆10带动棘爪11,11推动空套在A轴上的棘轮9作单向间歇转动。这种机构可在运行中调节定位销4,从而改变滑块6的位置,使棘轮9的转角获得调节,以此来控制机床的进给运动。 |
|
|
图(a)机架长度可调的棘轮调节机构 |
图(b)转位角可调的间歇转动机构 |
|
上图(b)中,机构的工作台1用齿牙盘(鼠齿盘)4定位,其间歇转动的转位角(分度角)可以按工作要求进行调整,等分或不等分均可实现,其单位调整量为齿盘一个齿的分度角。 工作台开始转位前需先上升,使其底面的上齿盘与定位齿盘分离;工作台转位完毕后下降复位。因此,在每个转位运动中工作台有“升-转位-降”的运动过程。 工作台1与螺杆2连接为一体,蜗轮3的内孔为螺母,从图示位置开始,蜗杆5转动,经蜗轮、螺母及螺杆使工作台上升一个距离h。此时两齿盘分离,螺杆下端凸缘2α与蜗轮接触,使螺母与螺杆停止相对转动。于是,在蜗杆继续转动时工作台随蜗轮转动,直到工作台周边上的撞块9接触电路开关8,电磁铁6控制的预定位销7上升,使工作台停止转动并获得初步定位。与此同时,电机反向转动,蜗杆换向反转,经蜗轮、螺母及螺杆使工作台下降,齿盘重新啮合,工作台获得精确定位。 工作台转动的角度取决于撞块9的位置,只要适当布置若干撞块,工作台就可按要求的若干个角度转动。因此本机构改变转位角的操作十分简便,容易适应内容多变的工作。 |
|