|
实现预期轨迹的机构 |
||||||
|
下图a,机构尺寸满足关系:L1=L2、L3=L4、L5=L6=L7=L8,当杆2转动时,Q点的轨迹为垂直于OA的一条直线。 图b,机构尺寸满足关系:AB=BC=BM,当滑块3沿垂直线上下滑动时,杆2端点M沿水平线NN作精确直线运动。 |
||||||
|
精确直线机构 |
||||||
|
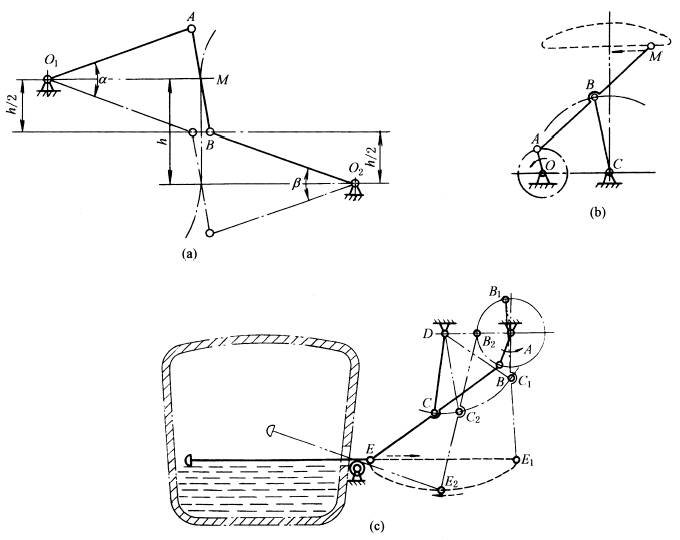
下图a取AB=h、O1A=O2B=1.5h,则AB中点M在行程为h范围内(相应摆角α=β≈40°)的轨迹近似直线。图b所示机构,当AB=BC=BM=2.5OA,OC=2OA,则OA绕O点转动,A点在左半圆时,M点的轨迹为近似直线。图c是扒渣机,是图b的具体应用实例。 |
||||||
|
近似直线机构 |
||||||
|
利用曲柄摇杆机构连杆曲线的直线段来实现近似平移的机构实例很多,如搅拌机、电影放映机的拉片机构等。 下图中,曲柄1转动时,连杆2上的M点沿图中点划线所示轨迹运动,若在M点设置抛光轮,则可利用轨迹的近似直线段进行皮革打光工作。 |
||||||
|
皮革打光机的近似直线机构 |
||||||
|
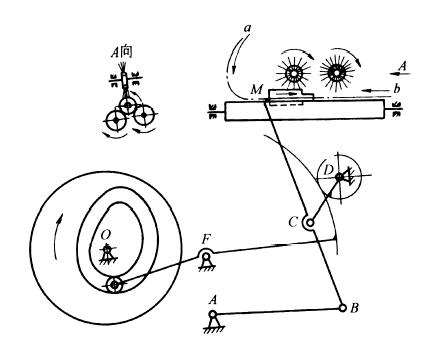
下图中,洗瓶机中的推瓶机构要求推头M自a沿轨迹以较慢的匀速推瓶并自b快速退回。以铰接四杆机构ABCD实现连杆上M点轨迹,而以凸轮控制CD杆的运动,从而实现M的预期速度。扇形齿轮是用来减小凸轮升程的。 |
||||||
|
以预期速度沿轨迹运动的凸轮连杆机构 |
||||||
|
图(1)中,当机构各杆具有图示位置关系时,油缸1活塞杆的伸缩使起重臂2上的E点沿垂直线升降。图中h1、h2表示两个升高位置。 图(2)为起重机结构,取BC=0.27AB,CM=0.83AB,CD=1.18AB,AD=0.64AB,当主动件AB绕A转动到AB1位置时,象鼻梁3上的M点作近似直线移动到M1点,吊钩m同样移动到m1。 |
||||||
|
图(1)起重铲的垂直升降机构 |
图(2)起重机变幅机构 |
|||||
|
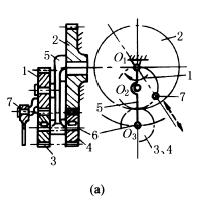
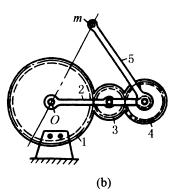
右图a,齿轮1的节圆直径等于齿轮2的节圆半径,齿轮2作为固定机架,齿轮3、4直径相等均与轴6用键连接,齿轮1、3、4与转臂5铰接。当转臂5绕O1转动时,齿轮1、3、4作行星运动。铰接于齿轮1节圆上的销7沿齿轮2的直径作直线运动。采用固定内齿轮传动也能得到直线运动,见往复运动机构(图行星齿轮简谐运动机构) 图b,齿轮1为固定机架,其中心O铰接转臂2,齿轮3、4与转臂2铰接,齿轮4的节圆直径等于齿轮1节圆半径,与转臂2等长的摆臂5与齿轮4固联。当转臂2绕O转动时,摆臂5的端点m在齿轮1的直径上作往复直线运动。 |
齿轮传动的直线机构 |
|||||
|
下图a,构件2、3、4、5、6、7和机架组成两个平行四边形,在边长为b的正方形导向框架2内有一等宽凸轮1(由四段 圆弧组成,即R1、R3、R2、R3),当凸轮绕固定点O2顺时针方向转动时,框架2上的M点,作边长为 轨迹。设t1、t2、t3为钻头的三个刀刃,它们组成一个等边三角形,其边长r=a,若钻头与等宽凸轮一起固连在钻杆上并绕固定点O1转动,则钻刃将在与框架2底板固联的工件(图中未示出)上钻出边长为a的正方形孔。根据所需的边长a,可求出其他尺寸:
图b,长rx的转臂1、2分别绕O1、O2转动(其中一个为主动),使节圆半径均为r3的行星齿轮3、4绕尺寸相同的固定内齿轮5、6作行星运动。拨杆7铰接于行星齿轮3、4上的A、B点,AB=O1O2,且O3A=O4B=rs,则拨杆上任意点都随行星齿轮作近似方形轨迹运动。实现此轨迹的机构尺寸为rx=3r3=6rs。正方形的边长 |
||||||
|
方形轨迹机构 |
||||||
|
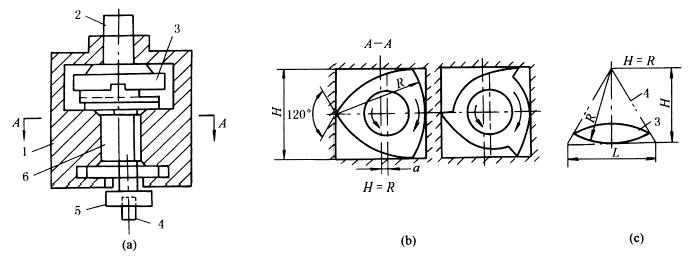
下图a,主轴2通过十字沟槽联轴器3驱使三棱柱杆6在机座1的方孔内绕方孔中心以半径a作圆周运动,三棱柱中心公转的方向与三棱柱沿方孔内边滚动方向相反,三棱柱6通过卡盘5带动三角钻头4重演三棱柱6与方孔之间的相对运动关系,加工出方孔。三棱柱和三角钻头的尖角均为120°,如图b所示。此法加工出的正四方形直角处出现一圆角,圆角半径约为正方形孔边长的0.15倍。 如将机座1的方孔改作成正三角形孔,钻头改成双棱弧形钻,则可加工出正三角形孔(如图c);如将机座1的方孔改作成正六方形孔,钻头改成五边形钻,则可加工出正六方形孔。 |
||||||
|
加工方孔钻的结构 |
||||||
|
如下图a,刀盘卡紧在车床的车头上,工件装在工件卡盘上,而工件卡盘装在可作纵向移动走刀的车床拖板上。如果在刀盘上对称安装两把车刀,加工时使刀盘转速比工件转速快一倍,且两者转向相同,这样刀具就能将工件切削出近似的正方形的外表面。 为了使刀盘与工件转向相同且转速差一倍,在两轴间增加一套齿轮,设z1=z2=24,z3=48,则:
如图b,若把工件和刀具间的相对运动看成工件固定不动,而刀盘中心O1以工件的转速绕工件中心O反方向转动,同时刀盘还绕自己的中心O1以比工件快一倍的转速转动,那么刀盘上刀具的刀尖就在工件表面上形成椭圆轨迹,两把车刀的刀尖在工件表面上切出两个轴线互相垂直的椭圆,其长轴为A+R,短轴为A-R。切削后的工件轮廓CDEF就是由四段椭圆弧线所组成的近似正方形。当加大刀盘半径并减小刀尖与工件中心O的距离,则椭圆很扁,CDEF就愈接近正方形。 如果在刀盘上安装三把车刀,彼此夹角为120°,就能切削出正六边形的工件。 |
||||||
|
车削正多边形工件的机构 |
||||||
|
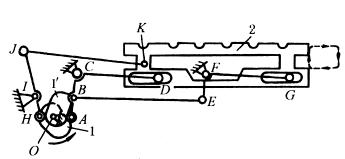
右图中,双联凸轮1和1' 绕O轴转动,送料台2沿近似矩形轨迹运动。其动作过程如下: 送料台2上升(下降)时,滚子H处于凸轮1' 的圆弧部分,杆HIJ不动,而滚子A在凸轮1的上升(下降)曲线的作用下,向右(左)摆,通过平行四边形机构BCEF及其延伸杆CD和FG将2举起(放下),这时,杆KJ绕J点上摆(下摆),因此送料台2运动轨迹的上升(下降)部分是一圆弧。送料台2水平向右(左)移动时,滚子A处于凸轮1的圆弧部分,机构ABCDEFG静止不动,而滚子H处于凸轮1' 的上升(下降)曲线部分,杆HIJ绕I点作顺(逆)时针方向摆动,杆JK推(拉)2向右(左)移动。 |
近似矩形送料机构 |
|||||
|
图(3)为圆珠笔装配线上的自动送进机构中所采用的双凸轮联动机构。主动轴I-I上的盘状凸轮2控制托架3上、下运动,从而将圆珠笔5抬起和放下,端面凸轮1及推杆6控制托架3左、右往复移动,从而使圆珠笔5沿着矩形轨迹K运动,将笔杆步进式地向前送进。 图(4)中,滑块4与推杆6铰接,滑块5上固联导槽7,杆6端部的滚子可在导槽中运动。当曲柄OB1、OB2绕O回转时,推杆6端部的推板T的轨迹a为近似矩形。此机构在饼干包装机的推包机中有应用。 |
||||||
|
图(3)双凸轮步进送进机构 |
图(4)凸轮-连杆组合推包机构 |
|||||
|
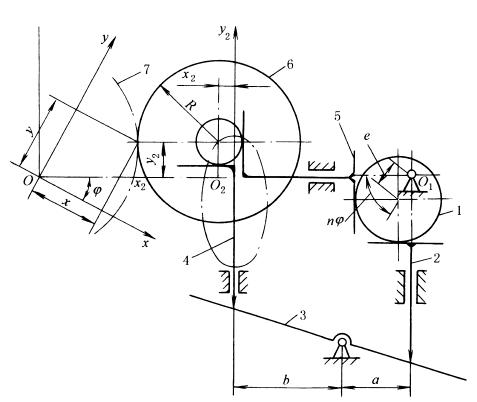
下图中,主动偏心轮1通过推杆2、杠杆3、推杆4和推杆5来控制砂轮6的轴心位置,使其按椭圆轨迹运动,其轴心方程为: x2=ecosnφ
|
||||||
|
磨削非圆零件机构 |
||||||
|
下图所示为油缸驱动步进送料机构。其动作如下:①油缸2的活塞杆不动,油缸1的活塞杆外伸时,使油缸2绕O点上摆,横梁4沿弧线 这样利用两个油缸交替动作使横梁按abcd的轨迹运动,以便运送物料。轧钢厂运送钢卷的步进梁采用了这种机构。 |
||||||
|
油缸驱动步进送料机构 |
||||||
|
下图a,机架1上有直交的沟槽,其内滑块2、3分别组成移动副,滑块分别与杆4铰接。当滑块2、3在槽内移动时,杆4上除AB中点M画出以O为圆心,OM为半径的圆a外,杆上其余各点均为椭圆轨迹,如β。设杆4上AC=a,AB=b,杆的倾斜角为φ,则C点在坐标系中的坐标为: x=bcosφ+acosφ y=asinφ C点轨迹的椭圆方程为:
销A、B间的距离可调节,以变更长、短半轴的长度,因而可得到不同大小的椭圆。 图b,齿轮2沿固定内齿轮1作行星运动,齿轮2节圆直径等于齿轮1的节圆半径。当齿轮2作行星运动时,其上节圆外的一点m的运动轨迹为椭圆α。 椭圆仪机构除用于解算装置,绘椭圆曲线外,尚用于仪表及夹具的增力装置。 |
||||||
|
椭圆仪机构 |
||||||
|
图(5)中,曲柄AB回转时,连杆BC上的E点形成图示轨迹,采用两套相同尺寸的曲柄摇杆机构,将它们连杆上的相应点E、E' 与输送机的推杆1铰接,这样,主动曲柄AB的回转可带动推杆按E点轨迹平动,利用轨迹上部近似水平段推送固定导杆2上的工件。 图(6)中,与齿轮1固联在偏心凸轮2绕A点转动时,使摆动导杆4在摇块3中绕B点摆动,导杆4左端的开口叉按图示轨迹α运送物料。此机构也可用于电影机的抓片机构。 |
||||||
|
图(5)连杆送料机构 |
图(6)偏心凸轮与连杆组合送料机构 |
|||||
|
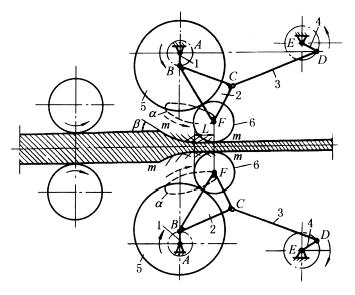
下图所示为振摆式轧钢机构,由上下对称的两个五杆机构组成,1、4为主动曲柄,5为支承辊,6为工作辊。当1、4转动时,工作辊的中心F按轨迹α曲线运动,并对钢材进行轧制。工作辊在不同位置时的包络线即为钢坯开口处的形状mm。轧辊与钢坯开始接触点处的咬入角β宜小,以减轻送料辊的载荷,直线段L宜长,使钢材表面平整。当机构各构件长度不变,仅改变两主动曲柄的转速,即可使杆2上点F的轨迹α及工作辊的包络线mm发生变化,使轧制钢坯的开口度相应地增加或减小。这样,当无专门的压下装置时,可轧制规格范围变化不大的各种轧件。 |
||||||
|
振摆式轧钢机构 |
||||||
|
图(7)中,齿轮1、2分别绕定轴O1、O2转动,两轮相互啮合,齿轮1与连杆6组成回转副A,齿轮2与连杆7组成回转副B,连杆6、7组成回转副C。在连杆6、7上分别固接有和面爪3、4,其伸出长度可以调节。各构件间尺寸关系为:两齿轮的尺寸相同;AC=BC;O1A=O2B。在机构初始位置,O1A、O2B和O1O2共线,且在相反方向转动。和面爪4相对于连杆7可以固定在不同位置,构件5为盛面缸,可绕自身轴线转动。当齿轮1绕定轴O1转动时,和面爪3、4上的D、E点分别描绘出轨迹曲线d和e,可满足和面要求。 图(8)中,连杆2上固接着插秧爪5,工作时要求插秧爪模拟人手动作,从秧箱中取出秧后插入土中。插秧爪5从秧箱中分秧时走的轨迹要近似圆弧,以便插秧爪顺利分秧和取秧可靠;要求插秧爪入土后到插深位置时稍向后运动,出土时,渐成垂直走向,以保证不将插好的秧苗重新带出。 |
||||||
|
图(7)和面机用齿轮连杆机构 |
图(8)水稻插秧机构 |
|||||