|
增力及夹持机构 |
||||
|
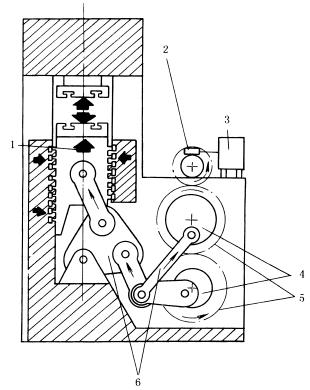
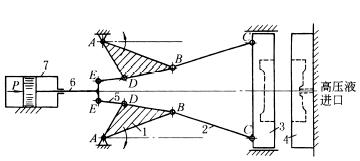
图(1)中,采用了双升角斜楔,大升角α1用来使夹紧构件迅速接近工件,小升角α用来使夹紧构件夹紧工件保持自锁。 图(2)中,夹紧力随被夹件尺寸的变化而变化,角α越小夹紧力越大,一般α=10°~25° |
||||
|
图(1)斜面- 杠杆式增力机构 |
图(2)铰链杠杆式夹紧机构 |
|||
|
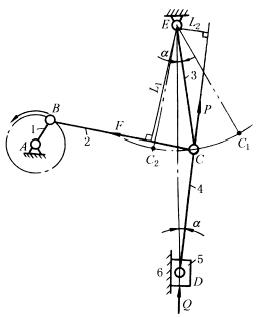
右图为六杆曲柄肘杆机构,是利用机构接近死点位置所具有的传力特性实现增力的实例。如果肘杆3的两极限位置EC1和EC2在ED线的两侧,当曲柄1回转一周时,滑块5可上下两次(可用于铆钉机);如果杆3的两极限位置取在ED线的一侧,则滑块5上下一次(如冲床)。设滑块产生的压力为Q,杆2、4受力为F、P,两肘杆3、4长度相等时,曲柄1施加于连杆2的力为:
式中 α―― 肘杆3、4与ED线的夹角; L1、L2―― 力F和P的作用线至轴心E的垂直距离。 在加压工作开始时,角α和线段L2很小,因此曲柄1施加于杆2上的力F很小,达到增压效果。在精压机、冲床等锻压设备中,为了获得短行程和高压力,常采用这种机构。 |
冲压增力机构 |
|||
|
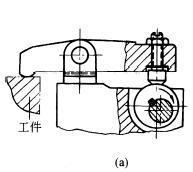
右图a,偏心轮绕固定点B转动时,带动活动鄂板AE摆动,产生增力作用。但动鄂板仅作绕轴心A的简单摆动,两鄂板的靠近量下大上小,因此,上部不能获得较大的破碎功。 图b,这种机构的动鄂板装于连杆上,当偏心轮绕固定点A转动时,动鄂板作平面复合运动。动鄂板和固定鄂板的靠近量上大而下小,这样能在破碎机的上部获得很大的破碎功,破碎效果好,而下部因行程小,能得到较细较均匀的矿块,偏心距e越小,破碎力越大,但过小的偏心距将降低效率,偏心距可近似由下式确定:
式中 f―― 轴承的滑动摩擦因数; d―― 偏心轮轴颈直径; η―― 效率。 |
破碎机构 |
|||
|
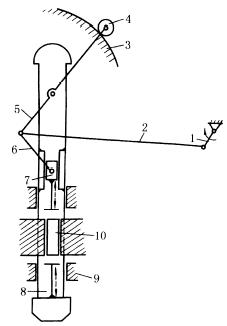
图(3)中,为保证砖坯10上下密度一致,需上下压头同时移动,进行双向等量加压,滑块7在拉杆架8的导轨中滑动,下压头装在8的下部,8的上部与杆5铰接,5的上端有一滚轮4可沿固定凸轮3滚动,凸轮3的曲线应能满足双向等量加压的要求。此机构可使压砖时的压力(最大可达1200t)不作用于机架上。 图(4)中,电动机3通过无级变速机构和离合器带动蜗杆机构2,再经过一对齿轮5传动两个同步旋转的曲轴4。两个曲轴的偏心率不同,从而各产生一个频率相同但振幅不同的运动。实现加工过程慢速回程较快的特性。能提高生产率。 |
||||
|
图(3)卸载式压砖机 |
图(4)双肘杆机构 1―滑块;2―蜗杆机构;3―带有无级变速机 构的电动机;4―曲轴;5―齿轮;6―双肘杆 |
|||
|
下图中,货车的重力W作用在通过钢绳芯的n-n线上,弯杆3可绕A转动,杆3、4在C处铰接,4与弯杆2在B处铰接,弯杆2可在支座5中左右滑动,矿斗作用于n-n线的重力W相当在杆1作用有力W和力矩Wl,这两力使杆3、4绕C转动,并对钢绳进行夹紧。 |
||||
|
单线架空索道抱索器机构 |
||||
|
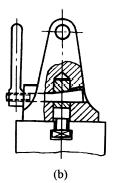
图(5)所示的压铸机合模机构由两个摆杆滑块机构对称安装组成。当高压油进入油缸7推动活塞右移时,驱动力P通过连杆5加在曲柄1上的D点处,迫使杆1绕轴心A摆动,并通过连杆2使活动压模3向固定压模4靠近,当活塞推至右端位置时,两压模3和4正好合拢,而曲柄1的AB线刚好与连杆2的BC共线,机构处于死点。这时,高压油的驱动力P撤除,并使金属液进入两模板间。因上下两曲柄滑块机构同时处于自锁状态,当注入金属液而产生几百吨的压力时,压模3也不会移动。 图(6)a为利用偏心凸轮的夹紧机构,适用于夹紧行程小,振动小的场合,工作时转动偏心轮。图b为利用斜面快速固定机构,工作时转动左边手柄。 |
||||
|
图(5)压铸机合模机构 |
图(6)能自锁的快速夹紧机构 |
|||
|
下图a,逆时针方向转动手柄1,使其与连杆2成一直线,这时机构处于死点位置,摇杆3对工件进行夹紧。图b,转动手柄2,使其与摇杆3成一直线,此时机构处于死点位置而自锁,并使工件夹紧。这种利用死点达到自锁的夹具,虽自锁性关,但结构简单,运作迅速。 |
||||
|
利用死点的自锁夹紧机构 |
||||
|
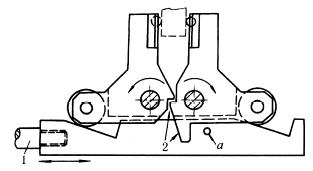
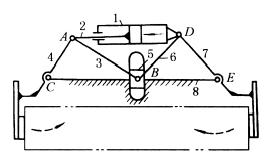
图(7)中,操作杆1左移时,销a通过块2使夹爪沿图示箭头方向移动,放松工件;操作杆1右移时,借斜面及滚轮的作用使夹爪反向移动夹紧工件。 图(8)中,汽缸两侧机构的构件尺寸对应相等,汽缸及其活塞杆1、2反向伸开(或相向收拢)带动杆4、7动作,滑块5可上下滑动,使4、7同时动作并夹紧(或放松)物料。 |
||||
|
图(7)摆动夹紧机构 |
图(8)气动夹紧机构 |
|||
|
图(9)中,操作杆1与右爪3铰接于A,爪2、3间以压簧相连,当1绕A下摆时,通过爪2上的凸块使夹爪夹紧,杆1上摆时,在压簧的作用下夹爪松开。 图(10)为用螺旋手动夹持机构将设备固定在轨道上,常用于轨道起重机上。 |
||||
|
图(9)浮动拉压夹紧机构 |
图(10)轨道夹持机构 |
|||
|
下图中,1为吊挂抓斗的升降绳,抓斗开闭时通过控制绳2操纵使鄂铲4开闭。轮3为增力滑轮,轮5为导向轮。 |
||||
|
斜压式双鄂抓斗机构 |
||||
|
下图a为杠杆滑槽式,结构简单,动作灵活,手爪开闭角度大。若尺寸a、b和拉力F一定时,增大α角可使夹紧力F1增大,但α过大会导致汽车行程太大,一般选取α=30°~40°。 图b为连杆式,可产生较大的夹紧力,均为铰链连接磨损较小,但结构较复杂,适用于抓取重量较大的工件。若尺寸b、c和推力F一定时,减小α角可增大夹紧力F1。当α=0°时,利用死点能自锁,此时去掉外力F,重物不会把手爪推开而脱落。 图c为自锁式,由于手爪回转中心O在重力作用线 |
||||
|
几种机械手的夹持器 |
||||
|
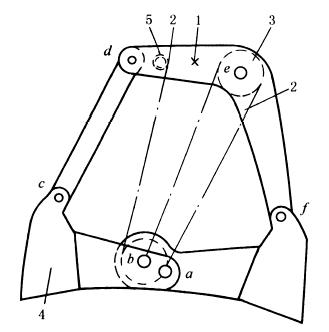
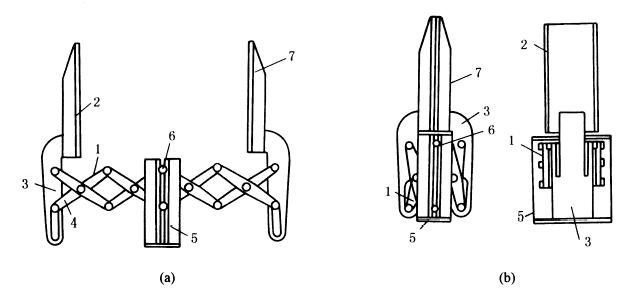
下图中,伸缩机构1一端和手爪的基部3铰接,另一端用铰销插在基部的滑动槽中滑动。伸缩机构的中间有一铰链6固定在固定基体5上,而对称的另一铰销则可在固定基体的槽中滑动,此铰销为驱动轴。当驱动轴向上运动时,伸缩机构张开,爪7便获得很大的开口度,如图a所示。当驱动轴向下运动时,则各连杆收缩,二爪闭合,如图b所示。 |
||||
|
开口度大的夹紧机构 |
||||
|
下图a,电磁铁5的两极上,均安装可变形的袋1,袋中装有磁粉体2,当袋与被吸着物4接触时,袋的外形可随被吸物外形改变。线圈3通电时,具有磁性的被吸物4就会被电磁爪1抓住。断电时,物体被释放。图b为被吸物较大时的结构。 |
||||
|
电磁抓取机构 |
||||
|
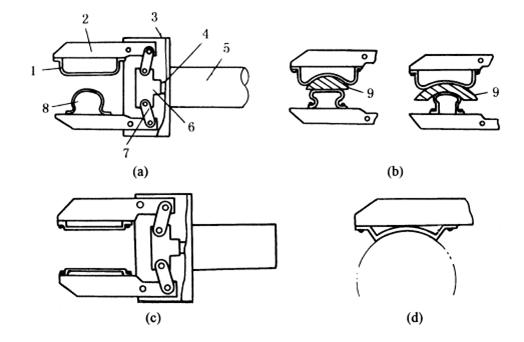
在下图a所示的抓取机构中,两手爪上,一爪装有平面弹性材料1,另一爪装凸面弹性材料8,其形状必须保证有足够的变形空间。当活塞杆4右移时,接头6带动连杆7使两手爪2相向运动,弹性材料与工件9接触后,即随工件的外形而变形,并用其弹性力夹紧工件。 图b为抓取二种不同形状的工件时,弹性材料变形的情况,它既保证了有足够的抓取夹紧力,又避免了夹紧力过于集中而损坏由易破碎材料制成的工件。 图c、d是另一种结构形式的抓取机构。这类机构可抓取特殊形状的工件,也可抓取易破损材料制成的工件。 |
||||
|
弹性手爪的抓取机构 |
||||