|
定传动比匀速转动机构 |
|||||
|
下图(a)中,平行四边形机构ABCD,两对面杆具有相同运动规律的特点。主动曲柄1逆时针方向转动时,带动从动杆3作同向同速转动,而送料杆2作平移运动,可将物料4一步一步地向前搬动。平行四边形机构使用广泛,如火车轮联动机构、多组平行四边形联轴器、绘图仪器、缩放机构等均有应用。 |
|||||
|
平行四边形机构 |
|||||
|
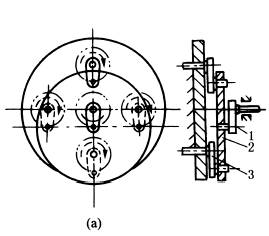
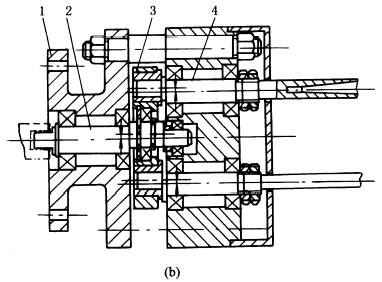
下图a主动曲柄1转动时,带动盘2作平移运动,从而同时带动四个等长曲柄3各绕自己的固定轴心作同速转动。此机构允许有较小的主、从动轴轴距。多头钻、多头铣等均可应用这种机构。当转速较高时应注意平衡。图b为多头钻的结构实例。主动偏心轴2通过圆盘3带动与2有相同偏心距e的钻杆4转动。 |
|||||
|
多个输出轴的平行四边形机构 |
|||||
|
下图圆盘2、4、6的等径圆周上各有三个等间隔的销轴,分别以三个长度为l的连杆相互铰接,形成多个平行四边形机构(图a)。主动轴1的转动通过中间圆盘及连杆使从动轴7作同速转动。这种机构可在运转中改变主、从动轴间的距离(最大轴距为2l,从动轴最大位移为4l,图b、c、d)。运转时盘4的中心具有不变的确定位置,仅在主、从动轴线重合时(零位移位置,图d),盘4处于位置不确定状态,故应避免使用这个位置。 |
|||||
|
两轴距可变的平行四边形机构 |
|||||
|
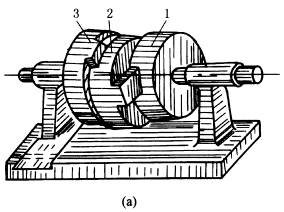
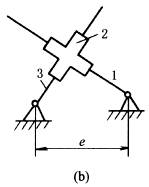
下图a为十字滑块联轴器,图b是其运动简图。主动转块1匀速转动时,通过连杆2驱动从动转块3作同向同速转动。这种联轴器常用于两轴线不易重合的平行轴的联接。 |
|||||
|
双转块机构 |
|||||
|
下图a,电机带动的主动轴O与两从动轴O1、O2均在同一车架上,且OO1=OO2;曲柄OA=O1B1=O2B2,连杆AB1=AB2=OO1。 图b,O1O2=A1A2、O3O4=B1B2、O1A1=O2A2=O3B1=O4B2,电机带动的主动轴O1(或O2)与车架1为一体,并支承在弹簧2上,使车架有减震缓冲作用,随着运行中的振动,引起O1O2与O3O4间的距离发生变化,图中在两个平行四边形机构中增加杆A3B3可补偿主、从动轴间距离的变化。 |
|||||
|
用于电力机车的平行四边形机构 |
|||||
|
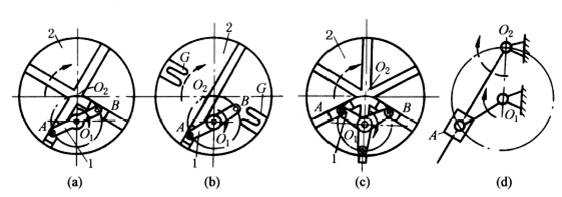
如下图所示,主动曲柄1绕O1转一周,从动圆盘2绕O2转半周。机构各构件的尺寸应有下列关系:曲柄长度等于中心距,即O1A(=O1B=O1C)=O1O2。 图a,主动双臂曲柄1两端铰接的滑块在从动盘的十字槽中滑动。图b,从动盘2上有一个径向槽和两个辅助槽G,当销B进入辅助槽时使机构顺利通过死点。图c,从动盘2上有三个径向槽,用三臂曲柄传动,传递力矩较均匀。图d,为这种导杆减速机构的结构简图。这种机构结构简单,并可将曲柄做成圆盘形以传递较大的载荷。 |
|||||
|
转动导杆减速机构 |
|||||
|
下图中,两端带滚子3(分别绕A、B轴转动)的双臂主动曲柄1绕固定轴O1转动,通过滚子3带动从动盘2绕固定轴O2同向转动,滚子3的中心A和B相对于圆盘2的运动轨迹为摆线γ,圆盘2的内缘曲线为γ的等距曲线β(距离等于滚子半径r)。这种机构中心距O1O2不能太大,否则γ曲线将出现交叉,O1O2的最大值为O1A/2,这时,曲柄1转一周,盘2转2/3周。 |
|||||
|
滚轮减速机构 |
|||||
|
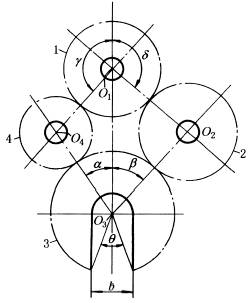
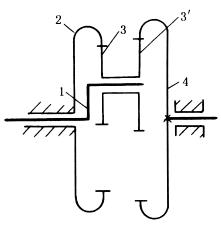
右图中,主动齿轮1经惰轮2、4带动从动轮3,这种机构由于采用了功率分流传动,可以减小机构体积和重量。此外,在某些机械中,由于生产上要求从动轮3上开有宽度为b的钳口槽(如石油钻井旋扣器)。采用这种机构能保证从动轮3作整周回转。设计时应注意以下各点: ①保证正确的安装条件: α(z3-z4)+γ(z4-z1)+β(z3-z2)+δ(z2-z1)=2πk 式中 k―― 应为正整数; z1、z2、z3、z4―― 各齿轮齿数。 ②O1O3>(d1+d3)/2;O2O4>(d2+d4)/2 式中 d1、d2、d3、d4―― 各轮的齿顶圆直径。 ③槽宽b所对中心角θ<α+β |
开口齿轮传动机构 |
||||
|
右图中,轴3和轮4固定不动,大轮2空套在轴3上可自由转动,轮2上相隔180°对称地装有两个在销轴上可自由转动的滚筒5,5与轮4又通过传送带相连,当主动轮1通过传动带带动轮2旋转时,则滚筒5绕固定轮4公转并绕销轴自转,称为行星滚筒。这种机构常用于抛光机上。 行星滚筒5的转速按下式计算:
式中 r1、r2、r4、r5―― 各带轮的半径。 |
皮带行星传动机构 |
||||
|
右图中,各轮齿数为z2、z3、z'3和z4,其传动比 若i41得正值,则4与1转向相同;得负值,则转向相反。例如,z3=z'3,z2=z4+1(或z2=z4-1),则可获得i41<0(或i41>0)的大传动比,用作机床的示数机构等。 |
大传动比行星机构 |
||||
|
右图中,偏心轴(转臂)H主动,内齿轮2固定,行星轮1从动,通过传动比为1的输出机构将行星轮的运动输出,总传动比
(z2-z1)点数差一般取得很小(常用差为1~4),可获得大的传动比,如z1和z2相差一个齿,则iH3=-z1(负号表示主、从动件转向相反),因此机构有传动比大,结构紧凑的优点。 轮1、2的齿廓曲线可为摆线和针齿:也可为渐开线,前者称为摆线针轮减速器,后者称为少齿差行星减速器。这类机构的主动轴转速一般可达到1500~1800r/min。若采用摆线针轮,则效率较高,功率范围也较大。 输出机构一般用销盘和孔盘组成(图b);传动功率较小时,也可采用一对齿数相等的内、外齿轮组成的零齿差输出机构(图c),为避免齿形干涉,该齿轮除径向变位外,还要切向负变位。 |
少齿差行星减速机构 |
||||
|
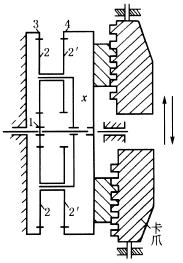
下图所示为用于车床电动卡盘上的3K型行星机构的例子,当电机带动主动齿轮1旋转时,通过行星架使齿轮4低速转动,通过轮4右端的阿基米德螺旋槽驱使卡爪卡紧或松开工件。这种行星机构结构紧凑,体积小,传动比范围大,但制造安装较复杂。常用于短期工作,中小功率的传动,如工厂内车间之间运输的悬链式输送机等。传动比为:
|
|||||
|
3K型行星机构 |
|||||
|
右图中,与差速器外壳固结的隔离罩1绕固定轴线B(轴线B与A重合)转动,在该隔离罩的均布径向槽内安置块状齿2,分别与凸轮盘3外缘齿和凸轮盘4内缘齿啮合,凸轮盘3和4分别固定在半轴A和B上。当差速器外壳及隔离罩转动时,将给凸轮盘3、轴A与凸轮盘4、轴B相应的驱动力矩;如两轴上所受的阻力矩相同,则它们以相同的转速回转,否则,两轴以不同的转速回转。 |
活齿减速器 |
||||
|
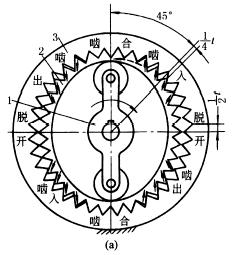
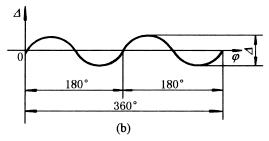
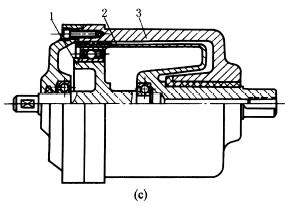
谐波传动是由谐波发生器1、柔性齿轮2(为一容易变形的环状薄壁零件)和刚性齿轮3组成(下图a)。三构件中任何一个皆可为主动,其余一为固定,一为从动。这种机构运动的传递是在发生器的作用下迫使柔轮产生弹性变形并与刚轮相互作用达到传动目的。如图a,当刚轮固定,发生器主动并连续转动时,则从动柔轮各处依次发生啮入、啮合、啮出及脱开四种连续工作状态,这种错齿运动使柔轮反向转动。发生器转动一周时,柔轮转过(z3-z2)/z2周。 柔轮的变形过程是一个基本对称的和谐波(图b)。在传动中发生器转一周,柔轮某一点变形的循环次数叫波数(等于发生器的滚轮数),一般常应用双波和三波。图b是双波变形波。谐波传动机构的刚轮和柔轮的周节t相等,但齿数不等,齿数差一般等于波数(或波数的整数倍)。谐波高Δ等于刚轮与柔轮的分度圆直径之差,即
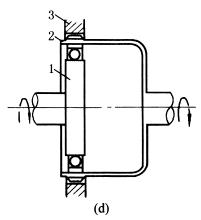
图c为应用较普通的单级双波的谐波减速器结构图,系刚轮固定、发生器主动,柔轮输出的结构,图d为其示意图。其传动比为:
当2固定,1主动,3从动时
当1固定,2(或3)主动,3(或2)从动时
此时传动比接近于1。 谐波传动的传动比范围大,单级传动比为1~500,体积小,重量轻,承载能力强,运转平稳,传动效率较高,结构简单,输出轴与输入轴位于同一轴心线上。由于这些优点,目前在生产中应用渐广。其缺点是柔轮需用抗疲劳强度很高的材料,散热性差。所以目前只用于较小功率(由不足一瓦到几十千瓦)。谐波传动也可做成摩擦式的,用于无级变速。 |
|||||
|
谐波传动机构 |
|||||