|
输出件实现周期性停歇的凸轮-齿轮组合机构 |
|||||||||
|
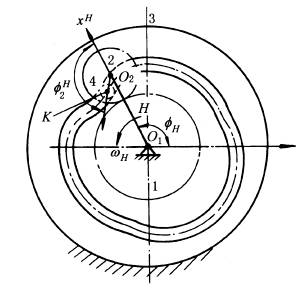
图(1)固定凸轮-周转轮系组合机构
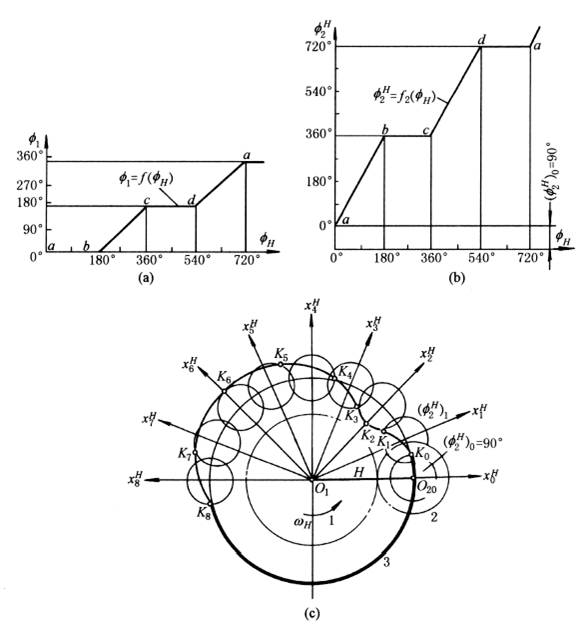
图(2)固定凸轮-周转轮系组合机构的设计 (a)设计给定的输出轴运动规律;(b)相对转臂H转化后的运动规律;(c)凸轮廓线设计 |
|||||||||
|
图(1)为一由周转轮系和固定凸轮组成的组合机构。周转轮系中的转臂H为主动件,输出齿轮为中心轮1,1与H共轴线O1,在行星轮2上固连有滚子4,它在固定凸轮3的曲线槽中运动。当主动件H以等角速度ω1连续旋转时输出齿轮1能实现周期性的具有长区间停歇的步进运动。这种组合机构中,由于凸轮可控制行星轮的运动,对输出轴有一定的运动补偿,因此在许多机械中,常采用这种固定凸轮-周转轮系组合机构的原理来设计校正装置。这种组合机构的设计步骤和方法如下。 1)给定工作所需要的输出轮1的运动规律f1=f1(fH)。例如图(2)a所示,主动转臂H转二周,输出轮1按停-等速转动-停-等速转动的规律转过一周。
如取z1=2z2,按式(1)画出 3)盘形槽凸轮机构234H相当于假想转臂H不动、而凸轮3绕O1以-ωH转动从而推动带滚子4的从动件(齿轮2) 按给定规律 |
|||||||||
|
4)凸轮的廓线设计。①以O1为中心,O1O2为半径作圆,并将它逆公共运动-ωH的方向(即顺ωH方向)等分,图(2) c中为每个分度22.5°,并分别作分度线 各小圆上按下表中所列数据截取K的相应位置。设取O2K的起始位置O2K0与 |
|||||||||
|
i |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
fH |
0° |
22.5° |
45° |
67.5° |
90° |
112.5° |
135° |
157.5° |
180° |
|
|
90° |
135° |
180° |
225° |
270° |
315° |
360° |
45°+360° |
90°+360° |
|
|
|||||||||