|
五杆机构与齿轮机构的组合机构 |
|
|
这种组合机构是以一个二自由度的五杆铰链机构为基础,利用装在不同杆件上的定轴轮系或周转轮系,使二个输入运动之间发生联系,以达到只用一个主动件就能使机构实现工作所需要的各种运动要求。这种组合机构多用来执行给定的轨迹。 |
|
|
五杆铰链机构与定轴轮系的组合 |
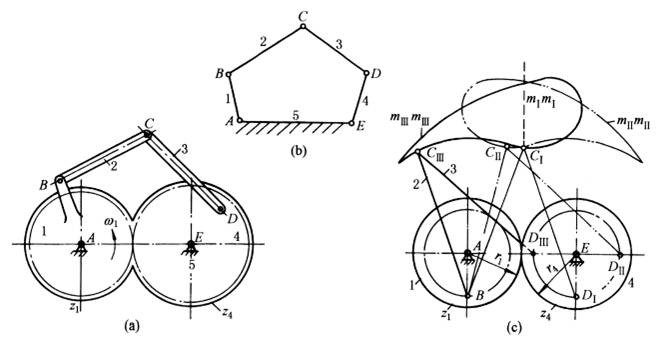
图(1) 五杆铰链-定轴轮系组合机构
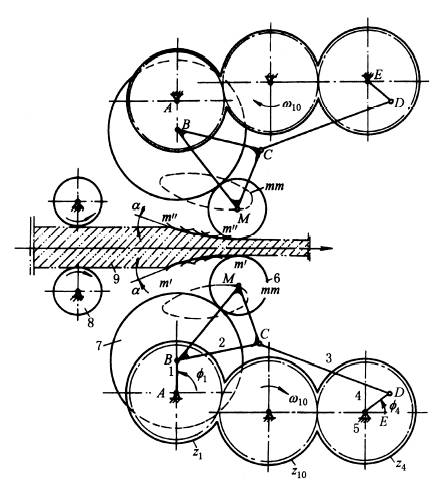
图(2) 轧钢机中的五杆-齿轮组合机构
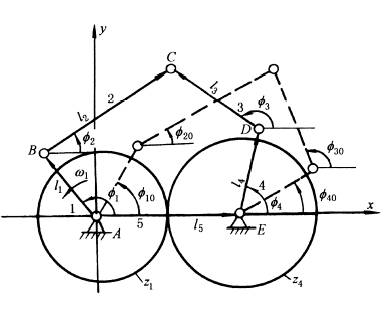
图(3) 五杆铰链-定轴轮系组合机构简图 |
|
图(1)a所示为五杆铰链-定轴轮系组合机构,它是在二自由度五杆铰链机构(图b)的基础上组成。当主动件1的运动给定时,机构中其他构件的运动均能确定。一般这种组合机构多用作使连杆2或3上的某一点执行工作需要的运动轨迹。例如在振摆式轧钢机中就应用这种组合机构(图2),当主动齿轮10连续旋转时,M点的运动轨迹为mm,一对工作轧辊6的包络线m'm'和m"m"实现轧制钢坯的工艺需要。调节曲柄1和4的相位角f1和f4,可改变M点的轨迹及相应的包络线形状,以满足不同的轧钢工艺要求。五杆铰链-定轴轮系组合机构的设计步骤和方法如下。 1)五杆铰链机构(图3)中各杆尺度间的关系式。 K1cos(f4-f3)-K2cos(f3-f1)-K3cosf1+K4=cos(f4-f1)-K5cosf3-K6cosf4 (1)
2)主、从动曲柄1和4间的位置关系式
式中 f10和f40是杆1和4的起始位置角。 选定五杆铰链机构的各杆尺寸及有关的起始位置角。在根据工作要求的轨迹或位置导引进行设计时,需确定五个杆长l1、l2、l3、l4和l5。如按主、从动曲柄的输出、输入角设计时,则可设定某一杆长为1,再确定其他四个杆长比。主、从动曲柄的起始位置角f10和f40可任意选定,调节此起始位置角可获得不同的连杆点轨迹。如图(1)c所示,主动曲柄1在同一位置AB时,而从动曲柄4在三个不同的位置,当分别在EDⅠ、EDⅡ和EDⅢ位置时,则连杆2上C点将有三种不同的运动轨迹mⅠmⅠ、mⅡmⅡ和mⅢmⅢ。 3)选定齿轮1和4的齿数z1和z4。
式中 n―― 齿轮外啮合的次数; K和Q―― 不可通约的整数。 当 4)确定连杆点C的方程式。
5)验算主、从动曲柄1和4的存在条件。
即 而
|
|
|
五杆铰链机构与周转轮系的复联组合机构 |
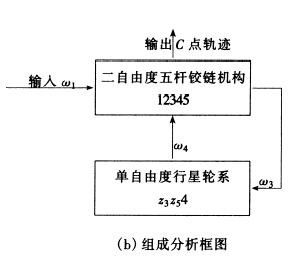
图(4) 五杆铰链-行星轮系组合机构
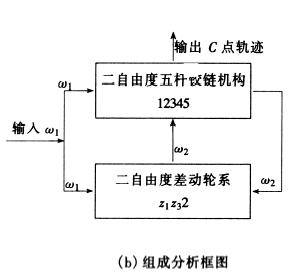
图(5) 五杆铰链-差动轮系组合机构 |
|
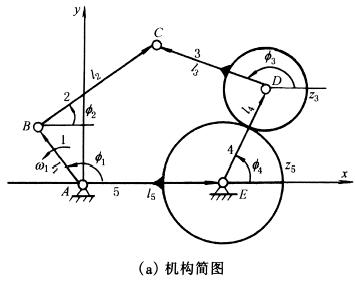
图(4)所示为一由五杆铰链机构12345和行星轮系z3z54复联组成的组合机构。其设计步骤、方法和有关计算公式,除式(2)改用式(7)外,其余完全与上述(1)相同。
图(5)所示为一由五杆铰链机构12345和差动轮系z1z32复联组成的组合机构。其设计步骤、方法和有关计算公式,除式(2)改用式(7)外,其余完成与上述(1)相同。
|
|