|
固定凸轮-连杆组合机构 |
||||
|
(1)实现给定轨迹的固定凸轮-连杆组合机构 |
固定凸轮-连杆组合机构 |
|||
|
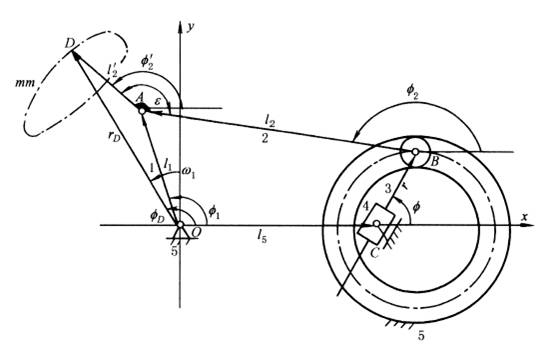
上图所示为由连杆机构12345和固定凸轮5所组成的组合机构。主动件1以ω1转动时,连杆2上D点执行给定轨迹mm。这种组合机构的运动相当于杆长BC可变的四杆铰链机构OABC,因而克服一般四杆铰链机构的连杆曲线无法精确实现给定轨迹的要求。其设计步骤和方法如下。 ①建立坐标系Oxy。一般取原点O为输入轴轴心,x轴为连心线OC方向。 ②将给定的轨迹mm分成若干分点,定出一系列的向径rD和fD。 ③选定杆长l1、l2和l5,以及执行点D在连杆2上的位置l'2和ε角。 ④确定A点的一系列分度位置,以O为中心、l1为半径作曲柄圆,以一系列D为中心,l'2为半径作圆弧,它与曲柄圆的交点即得一系列的A点。 ⑤确定B点的一系列位置。连AD,在此基础上按角ε和杆长l2定出一系列的B点相应位置。 ⑥画出凸轮5的廓线把一系列的B点连成曲线即凸轮的理论廓线。在理论廓线上作一系列的滚子圆,其内、外包络线即固定凸轮5的曲线槽。 ⑦凸轮理论廓线的极坐标方程式(以C为极坐标中心,f角由x轴起逆时针量度)。凸轮的理论廓线方程式为:
其中
式中 ±号按机构的位置连续性取定。 |
||||
|
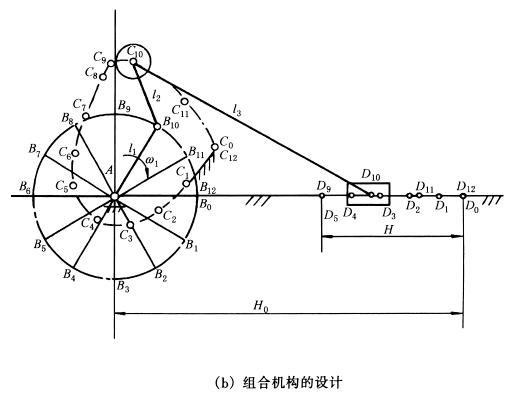
(2)实现给定运动规律的固定凸轮-连杆组合机构 |
图(1) 固定凸轮-连杆组合机构
图(2) 糖果包装机中应用的固定凸轮-连杆组合机构 |
|||
|
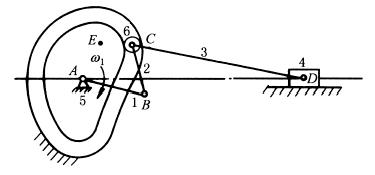
图(1)为一由连杆机构和固定凸轮组成的组合机构。主动件1以等角速度ω1连续旋转,通过连杆2和3带动滑块4往复移动。这种组合机构相当于从动曲柄CE长度可变的六杆机构ABCDE(E为凸轮理论轮廓曲线的曲率中心)。具有较长停歇期,可用尺寸较小的凸轮来实现较大输出行程的优点。其设计步骤和方法如下。 ①给定设计条件。主动曲柄长度l1=20mm,角速度ω1=10s-1,输出滑块的起始位置H0=88mm,行程H=36mm,运动规律如下: |
||||
|
曲柄转角f 1 |
0°~150° |
150°~270° |
270°~360° |
|
|
滑块位移sD |
等速向左36mm |
停歇 |
等速向右36mm |
|
|
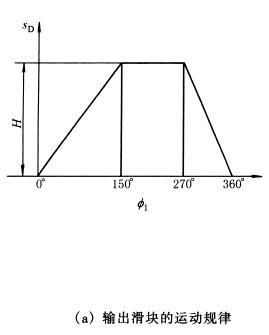
②画出输出滑块的位移曲线如图(2)a所示。 ③以A为中心,l1为半径作曲柄圆,顺ω1取12等分,得B0、B1、…、B12。同时将行程H按图(2)a所示运动规律求得滑块相应的分点D0、D1、…、D12,见图(2)b。 ④选定连杆BC和CD的长度l2和l3,由相应的B和D分点中求得变长BD的最大和最小距离: (lBD)max=72mm,(lBD)min=56mm 一般可按下列条件求l2和l3: l2+l3≥(lBD)max l3-l2≤(lBD)min 图(2)b中取:l3=68mm,l2=16mm。 ⑤凸轮廓线设计,以B0为中心、l2为半径作圆弧,再以D0为中心、l3为半径作圆弧,两圆弧的交点为C0,它就是主动曲柄转角f1=0时凸轮理论廓线上的点。同理,分别作出12个C点,各个C点连接起来即固定凸轮的理论廓线。在理论廓线上作一系列滚子圆,其内外包络线即凸轮的工作廓线(图中未画出)。 |
||||